Research Research projects at CAS Lab.
CRII: RI: Distributed, Stable and Robust Topology Control: New Methods for Asymmetrically Interacting Multi-Robot Teams
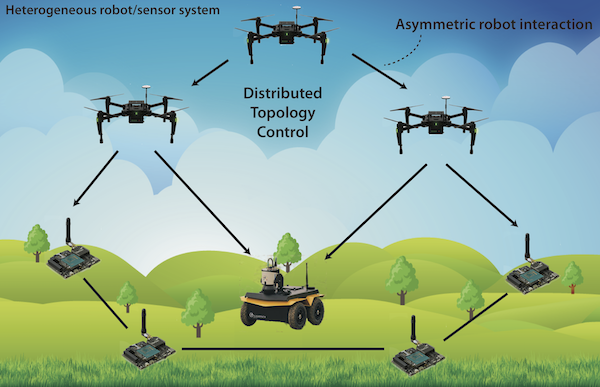
Overview: Recent years have seen a rapid increase of robotics and autonomy in critical segments of research and industry. While single robot autonomy continues to mature, multi-robot systems remain somewhat in their infancy, both theoretically and in application. This observation is perhaps the consequence of a natural progression of robotics research, but a simpler explanation is that multi-robot coordination is highly complex. The typical problems of single robot systems: perception, estimation, motion, and decision-making, are particularly difficult in distributed multi-robot systems, where coordination is subject to limited robot-to-robot communication and sensing, asynchronicity, and heterogeneity. In the area of coordinated motion control, an understanding of stable control methodologies has been developed, however it is often at the expense of restrictive assumptions. This project lies at the intersection of three such assumptions in multi-robot control: (1) that global information is available to all robots at all times (i.e., not distributed); (2) that robot-to-robot interactions are symmetric among team members; and (3) that the communication and sensing graph topologies among robots possess the properties necessary to guarantee coordination. This project aims to lessen such restrictions in distributed multi-robot teams by developing new control-theoretic methods for topology control that guarantee stability and robustness to disturbance in the presence of asymmetric robot interaction, with validation in field experiments using commercial off-the-shelf robotic and sensor platforms.
Distributed multi-robot systems will enhance the scalability, failure robustness, and spatiotemporal reach of modern autonomy. The difficulty of such systems lies in the fact that autonomous coordination is ultimately tied to how robots interact. The topological properties that describe robot interaction, such as connectivity, are necessary for stable coordination, and are thus critical in guaranteeing the predictability and safety of team autonomy. Complicating matters is the fact that state-of-the-art communication and sensing is often highly anisotropic (e.g., cameras), and heterogeneous systems are by design asymmetric in nature. This makes coordination exceedingly difficult. Indeed, these problems require new innovations in distributed multi-robot motion control.
Towards this goal, this project focuses on the following objectives of developing: (1) non-linear motion controllers that guarantee stable multi-robot coordination for an identified class of asymmetric robot interactions; (2) distributed algorithms for determining stable transitions in asymmetric communication and sensing topologies; (3) extensions for hardware safe control inputs and robustness to external disturbance; and (4) field experiments with aerial and ground robots, and an Internet of Things (IoT) sensor network in a target tracking regime.
Intellectual Merit: This project intersects novel techniques from control and graph theory to derive stability guarantees for a new class of asymmetric topology control laws. The theoretical approaches if successful will enable guaranteed coordination for a large class of distributed multi- robot systems. Furthermore, control-theoretic advances will be demonstrated in target tracking field exercises, contributing to the experimental state-of-the-art beyond the laboratory.
Broader Impacts: Success of the theoretical endeavors will find broad relevance in applications spanning intelligent transportation, precision agriculture, autonomous construction, and defense. The developed autonomy will also enable deeper experimentation outside of laboratories by guaranteeing the necessary conditions for various coordination methods. Finally, the project includes a comprehensive outreach plan consisting of: (1) K-12 academic experiences for underrepresented students in collaboration with Virginia Tech's Center for Enhancement of Engineering Diversity; (2) graduate curriculum; and (3) contributions of open-source software tools to the robotics community.
Project Publications
P. Mukherjee, A. Gasparri, and R. K. Williams. "Stable motion and distributed topology control for multi-agent systems with directed interactions." IEEE Conference on Decision and Control, 2017. doi: 10.1109/CDC.2017.8264165.