Research Research projects at CAS Lab.
Our Sponsors


Our Projects
-
- NSF
- Website
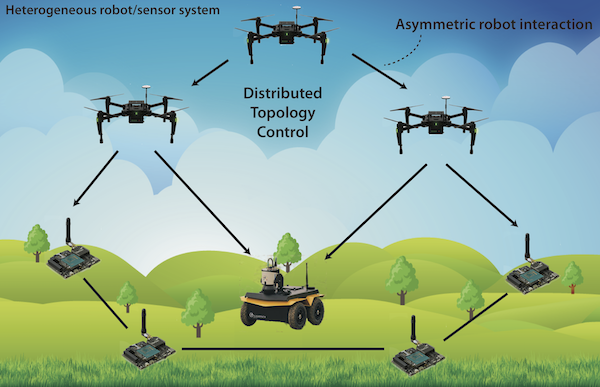
CRII: RI: Distributed, Stable and Robust Topology Control: New Methods for Asymmetrically Interacting Multi-Robot Teams
This project aims to eliminate three assumptions that currently limit the autonomous control of multi-robot teams: (1) that complete system information is available to all robots at all times; (2) that robot-to-robot interactions are symmetric among team members (i.e., I see you and you see me); and (3) that interactions among robots provide enough information to guarantee predictable and safe robot motion.
Learn More -
- NIFA
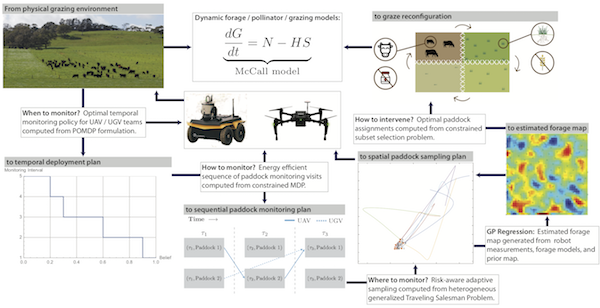
CPS: Medium: Multi-Scale Planning in Robot Teams for Persistent Monitoring and Intervention in Precision Grazing
This project lies at the intersection of important theoretical challenges in cyber-physical planning and perception, and critical frontiers in agriculture. In particular, this project focuses on the development of multi-scale planning algorithms for robot teams to autonomously monitor and actively intervene in herd management for precision grazing to improve land productivity and lessen environmental impacts, while utilizing commercial off-the-shelf robotic and sensor platforms.
Learn More -

- NSF
- Website
NRI: INT: Balancing Collaboration and Autonomy for Multi-Robot Multi-Human Search and Rescue
This project seeks to redefine lost person search-and-rescue (SAR) by enabling teams of human searchers and unmanned aerial robots to collaborate towards improving search outcomes and reducing human effort.
Learn More