Research Research projects at CAS Lab.
CPS: Medium: Multi-Scale Planning in Robot Teams for Persistent Monitoring and Intervention in Precision Grazing
Overview: Recent years have seen a rapid influx of autonomy in critical agricultural sectors. Many applications of autonomy in agriculture are restricted to passive data collection and remote monitoring. At the same time, there are fundamentally important problems that remain relatively untreated by recent thrusts in autonomous precision agriculture. This project lies precisely at the intersection of important theoretical challenges in cyber-physical planning and perception, and critical frontiers in agriculture. In particular, this project focuses on the development of multi- scale planning algorithms for robot teams to autonomously monitor and actively intervene in herd management for precision grazing to improve land productivity and lessen environmental impacts, while utilizing commercial off-the-shelf robotic and sensor platforms.
Precision grazing will increase livestock productivity by actively controlling the grazing patterns of cattle while providing other benefits such as controlling noxious weeds and maintaining plant diversity. Automation in these domains is difficult due to the necessity of large-scale coordinated perception and planning in dynamic environments over widely varying timescales. This requires new innovations in CPS through synergistic collaborations between roboticists and agronomists.
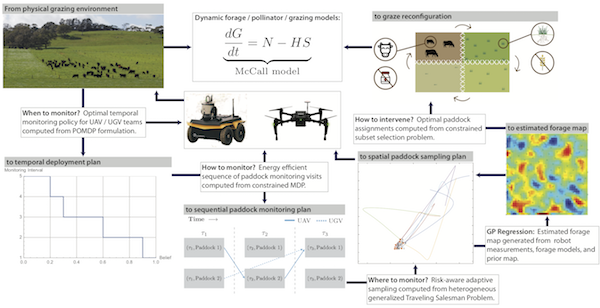
Towards this goal, this project focuses on the following science and engineering of CPS objectives of developing: (1) multi-scale CPS planning algorithms for autonomous monitoring and intervention that addresses the long-term question of when to monitor and the short-term question of where and how to monitor; (2) prototype systems of ground and aerial robots for autonomous forage height perception; (3) modeling and field experimentation for evaluating the outcome of long-term optimization of grazing and pollinator conservation in remote cattle farms.
Intellectual Merit: This project intersects novel techniques from decision theory, risk-aware path planning, and combinatorial optimization, and merge these results with foundational tools from control theory, estimation, and active perception. The theoretical approaches will provide orders of magnitude improvement in computational complexity for multi-scale robot planning, through a novel hierarchical design. On the agricultural front, decision-theoretic advancements will provide novel modeling and decision resources for active grazing and ecological mitigation practices.
Broader Impacts: Success of the theoretical endeavors will find broad relevance in coordinating heterogeneous systems over varying spatiotemporal scales, with applications spanning intelligent transportation, environmental monitoring, and defense. The developed autonomy will also enable new metrics, improved modeling and simulation tools, and more agile decision-making in the agricultural sciences, by supplying datasets with precision and at scales impossible to achieve for humans. Finally, the project includes a comprehensive outreach plan consisting of: (1) K-12 academic experiences for students in collaboration with Virginia Tech's Center for Enhancement of Engineering Diversity; (2) dissemination of agricultural findings through collaboration with the Plant Management Network of the American Phytopathological Society and the Natural Resources Conservation Service of the USDA; (3) interdisciplinary graduate curriculum; and (4) contributions of open-source software and hardware development tools to the robotics community.
Project Publications
J. Liu and R. K. Williams. "Optimal Intermittent Deployment and Sensor Selection for Environmental Sensing with Multi-Robot Teams." IEEE International Conference on Robotics and Automation, 2018. doi: 10.1109/ICRA.2018.8460215.